[CUDA编程] cuda graph优化心得
·
CUDA Graph
1. cuda graph的使用场景
- cuda graph在一个kernel要多次执行,且每次只更改kernel 参数或者不更改参数时使用效果更加;但是如果将graph替换已有的kernel组合,且没有重复执行,感觉效率不是很高反而低于原始的kernel调用;【此外, graph启动还需要耗时】
2. 使用方式
2.1 stream capture 方式
- 基本范式, 通过start capture 和end Capture 以及 构建graph exec方式实现graph执行,效率不高;用于graph多次执行的情况。ref: cuda_sample: jacobi
- 不需要GraphCreate 一个graph对象。cudaStreamEndCapture 会直接创建一个graph。
checkCudaErrors(
cudaStreamBeginCapture(stream, cudaStreamCaptureModeGlobal));
checkCudaErrors(cudaMemsetAsync(d_sum, 0, sizeof(double), stream));
if ((k & 1) == 0) {
JacobiMethod<<<nblocks, nthreads, 0, stream>>>(A, b, conv_threshold, x,
x_new, d_sum);
} else {
JacobiMethod<<<nblocks, nthreads, 0, stream>>>(A, b, conv_threshold,
x_new, x, d_sum);
}
checkCudaErrors(cudaMemcpyAsync(&sum, d_sum, sizeof(double),
cudaMemcpyDeviceToHost, stream));
checkCudaErrors(cudaStreamEndCapture(stream, &graph));
if (graphExec == NULL) {
checkCudaErrors(cudaGraphInstantiate(&graphExec, graph, NULL, NULL, 0));
} else {
cudaGraphExecUpdateResult updateResult_out;
checkCudaErrors(
cudaGraphExecUpdate(graphExec, graph, NULL, &updateResult_out));
if (updateResult_out != cudaGraphExecUpdateSuccess) {
if (graphExec != NULL) {
checkCudaErrors(cudaGraphExecDestroy(graphExec));
}
printf("k = %d graph update failed with error - %d\n", k,
updateResult_out);
checkCudaErrors(cudaGraphInstantiate(&graphExec, graph, NULL, NULL, 0));
}
}
checkCudaErrors(cudaGraphLaunch(graphExec, stream));
checkCudaErrors(cudaStreamSynchronize(stream));
// 封装 capture过程
class MyCudaGraph {
public:
CudaGraph()
: graph_(nullptr),
graph_instance_(nullptr),
stream_(nullptr),
is_captured_(false) {
RPV_CUDA_CHECK(cudaGraphCreate(&graph_, 0));
}
~CudaGraph() {
if (graph_ != nullptr) {
RPV_CUDA_CHECK(cudaGraphDestroy(graph_));
}
if (graph_instance_ != nullptr) {
RPV_CUDA_CHECK(cudaGraphExecDestroy(graph_instance_));
}
}
void set_stream(const cudaStream_t& stream) { stream_ = stream; }
const cudaGraph_t& graph() const { return graph_; }
const cudaGraphExec_t& graph_instance() const { return graph_instance_; }
void CaptureStart() const {
RPV_CUDA_CHECK(
cudaStreamBeginCapture(stream_, cudaStreamCaptureModeGlobal));
}
void CaptureEnd() const {
// stream 捕捉模式不需要cudaGraphCreate 来初始化 graph_.
RPV_CUDA_CHECK(cudaStreamEndCapture(stream_, &graph_));
}
bool IsCaptured() const { return is_captured_; }
void Launch() const {
if (graph_instance_ == nullptr) {
RPV_CUDA_CHECK(
cudaGraphInstantiate(&graph_instance_, graph_, nullptr, nullptr, 0));
}
RPV_CUDA_CHECK(cudaGraphLaunch(graph_instance_, stream_));
}
void UpdateLaunch() const {
cudaGraphExecUpdateResult update_result;
// 当第一次构建完graph_instance_(cudaGraphExec_t)后, 后续捕捉都只需要更新graphexec 即可。
RPV_CUDA_CHECK(
cudaGraphExecUpdate(graph_instance_, graph_, nullptr, &update_result));
if (update_result != cudaGraphExecUpdateSuccess) {
if (graph_instance_ != nullptr) { // 注意,如果更新失败,则需要将graph_instance_ 删除,并用cudaGraphInstantiate重新生成一个新的graph exec对象。
RPV_CUDA_CHECK(cudaGraphExecDestroy(graph_instance_));
}
LOG(WARNING) << "cuda graph update failed.";
RPV_CUDA_CHECK(
cudaGraphInstantiate(&graph_instance_, graph_, nullptr, nullptr, 0));
}
RPV_CUDA_CHECK(cudaGraphLaunch(graph_instance_, stream_)); // 执行graph是通过cudaGraphLaunch 执行cudaGraphExec_t对象来实现
}
void AddKernelNode(cudaGraphNode_t& node, cudaKernelNodeParams& param) const {
node_ = node;
cudaGraphAddKernelNode(&node_, graph_, nullptr, 0, ¶m); // 往graph中添加node_,注意需要提前cudaGraphCreate graph才行。
}
void ExecKernelNodeSetParams(cudaKernelNodeParams& param) const {
cudaGraphExecKernelNodeSetParams(graph_instance_, node_, ¶m);
RPV_CUDA_CHECK(cudaGraphLaunch(graph_instance_, stream_));
}
private:
mutable cudaGraphNode_t node_;
mutable cudaGraph_t graph_;
mutable cudaGraphExec_t graph_instance_;
mutable cudaStream_t stream_;
mutable bool is_captured_;
DISALLOW_COPY_AND_ASSIGN(CudaGraph);
};
2.2 Node Param方式
- ref: cuda sample: jacobi
- 注意node的方式需要 构建每个node的依赖node。并且通过更新kernel param的方式来更新graph exec, 效率可能更高。但是
cudaGraph_t graph;
cudaGraphExec_t graphExec = NULL;
double sum = 0.0;
double *d_sum = NULL;
checkCudaErrors(cudaMalloc(&d_sum, sizeof(double)));
std::vector<cudaGraphNode_t> nodeDependencies;
cudaGraphNode_t memcpyNode, jacobiKernelNode, memsetNode;
cudaMemcpy3DParms memcpyParams = {0};
cudaMemsetParams memsetParams = {0};
memsetParams.dst = (void *)d_sum;
memsetParams.value = 0;
memsetParams.pitch = 0;
// elementSize can be max 4 bytes, so we take sizeof(float) and width=2
memsetParams.elementSize = sizeof(float);
memsetParams.width = 2;
memsetParams.height = 1;
checkCudaErrors(cudaGraphCreate(&graph, 0));
checkCudaErrors(
cudaGraphAddMemsetNode(&memsetNode, graph, NULL, 0, &memsetParams));
nodeDependencies.push_back(memsetNode);
cudaKernelNodeParams NodeParams0, NodeParams1;
NodeParams0.func = (void *)JacobiMethod;
NodeParams0.gridDim = nblocks;
NodeParams0.blockDim = nthreads;
NodeParams0.sharedMemBytes = 0;
void *kernelArgs0[6] = {(void *)&A, (void *)&b, (void *)&conv_threshold,
(void *)&x, (void *)&x_new, (void *)&d_sum};
NodeParams0.kernelParams = kernelArgs0;
NodeParams0.extra = NULL;
checkCudaErrors(
cudaGraphAddKernelNode(&jacobiKernelNode, graph, nodeDependencies.data(),
nodeDependencies.size(), &NodeParams0));
nodeDependencies.clear();
nodeDependencies.push_back(jacobiKernelNode);
memcpyParams.srcArray = NULL;
memcpyParams.srcPos = make_cudaPos(0, 0, 0);
memcpyParams.srcPtr = make_cudaPitchedPtr(d_sum, sizeof(double), 1, 1);
memcpyParams.dstArray = NULL;
memcpyParams.dstPos = make_cudaPos(0, 0, 0);
memcpyParams.dstPtr = make_cudaPitchedPtr(&sum, sizeof(double), 1, 1);
memcpyParams.extent = make_cudaExtent(sizeof(double), 1, 1);
memcpyParams.kind = cudaMemcpyDeviceToHost;
checkCudaErrors(
cudaGraphAddMemcpyNode(&memcpyNode, graph, nodeDependencies.data(),
nodeDependencies.size(), &memcpyParams));
checkCudaErrors(cudaGraphInstantiate(&graphExec, graph, NULL, NULL, 0));
NodeParams1.func = (void *)JacobiMethod;
NodeParams1.gridDim = nblocks;
NodeParams1.blockDim = nthreads;
NodeParams1.sharedMemBytes = 0;
void *kernelArgs1[6] = {(void *)&A, (void *)&b, (void *)&conv_threshold,
(void *)&x_new, (void *)&x, (void *)&d_sum};
NodeParams1.kernelParams = kernelArgs1;
NodeParams1.extra = NULL;
int k = 0;
for (k = 0; k < max_iter; k++) {
checkCudaErrors(cudaGraphExecKernelNodeSetParams(
graphExec, jacobiKernelNode,
((k & 1) == 0) ? &NodeParams0 : &NodeParams1));
checkCudaErrors(cudaGraphLaunch(graphExec, stream));
checkCudaErrors(cudaStreamSynchronize(stream));
if (sum <= conv_threshold) {
checkCudaErrors(cudaMemsetAsync(d_sum, 0, sizeof(double), stream));
nblocks.x = (N_ROWS / nthreads.x) + 1;
size_t sharedMemSize = ((nthreads.x / 32) + 1) * sizeof(double);
if ((k & 1) == 0) {
finalError<<<nblocks, nthreads, sharedMemSize, stream>>>(x_new, d_sum);
} else {
finalError<<<nblocks, nthreads, sharedMemSize, stream>>>(x, d_sum);
}
checkCudaErrors(cudaMemcpyAsync(&sum, d_sum, sizeof(double),
cudaMemcpyDeviceToHost, stream));
checkCudaErrors(cudaStreamSynchronize(stream));
printf("GPU iterations : %d\n", k + 1);
printf("GPU error : %.3e\n", sum);
break;
}
}
- 对比发现 graph 反而耗时更长
2.3 通过传递kernel为指针,然后更改指针的值来是graph执行更高效
- 官方其他实例,通过更新值
- ref: mandrake: wtsne_gpu
这个开源工程通过封装 device value为一个container,从而通过替换这个显存位置的值来重复执行graph,这样kernel参数不用修改,效率更高。
// Start capture
capture_stream.capture_start();
// Y update
wtsneUpdateYKernel<real_t>
<<<block_count, block_size, 0, capture_stream.stream()>>>(
device_ptrs.rng, get_node_table(), get_edge_table(), device_ptrs.Y,
device_ptrs.I, device_ptrs.J, device_ptrs.Eq, device_ptrs.qsum,
device_ptrs.qcount, device_ptrs.nn, device_ptrs.ne, eta0, nRepuSamp,
device_ptrs.nsq, bInit, iter_d.data(), maxIter,
device_ptrs.n_workers, n_clashes_d.data());
// s (Eq) update
cub::DeviceReduce::Sum(qsum_tmp_storage_.data(), qsum_tmp_storage_bytes_,
qsum_.data(), qsum_total_device_.data(),
qsum_.size(), capture_stream.stream());
cub::DeviceReduce::Sum(
qcount_tmp_storage_.data(), qcount_tmp_storage_bytes_, qcount_.data(),
qcount_total_device_.data(), qcount_.size(), capture_stream.stream());
update_eq<real_t><<<1, 1, 0, capture_stream.stream()>>>(
device_ptrs.Eq, device_ptrs.nsq, qsum_total_device_.data(),
qcount_total_device_.data(), iter_d.data());
capture_stream.capture_end(graph.graph());
// End capture
// Main SCE loop - run captured graph maxIter times
// NB: Here I have written the code so the kernel launch parameters (and all
// CUDA API calls) are able to use the same parameters each loop, mainly by
// using pointers to device memory, and two iter counters.
// The alternative would be to use cudaGraphExecKernelNodeSetParams to
// change the kernel launch parameters. See
// 0c369b209ef69d91016bedd41ea8d0775879f153
const auto start = std::chrono::steady_clock::now();
for (iter_h = 0; iter_h < maxIter; ++iter_h) {
graph.launch(graph_stream.stream());
if (iter_h % MAX(1, maxIter / 1000) == 0) {
// Update progress meter
Eq_device_.get_value_async(&Eq_host_, graph_stream.stream()); // 只是更改kernel参数指针中的值
n_clashes_d.get_value_async(&n_clashes_h, graph_stream.stream());
real_t eta = eta0 * (1 - static_cast<real_t>(iter_h) / (maxIter - 1));
// Check for interrupts while copying
check_interrupts();
// Make sure copies have finished
graph_stream.sync();
update_progress(iter_h, maxIter, eta, Eq_host_, write_per_worker,
n_clashes_h);
}
if (results->is_sample_frame(iter_h)) {
Eq_device_.get_value_async(&Eq_host_, copy_stream.stream());
update_frames(results, graph_stream, copy_stream, curr_iter, curr_Eq,
iter_h, Eq_host_);
}
}
2.4
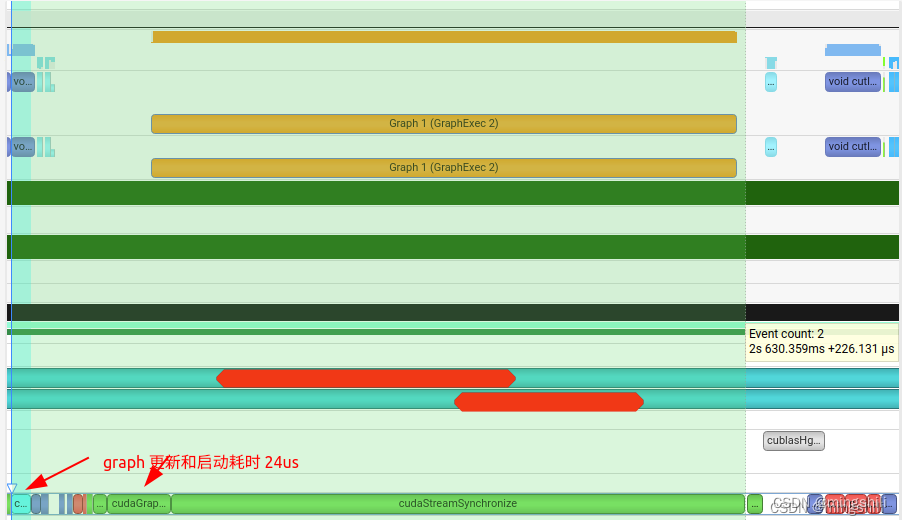
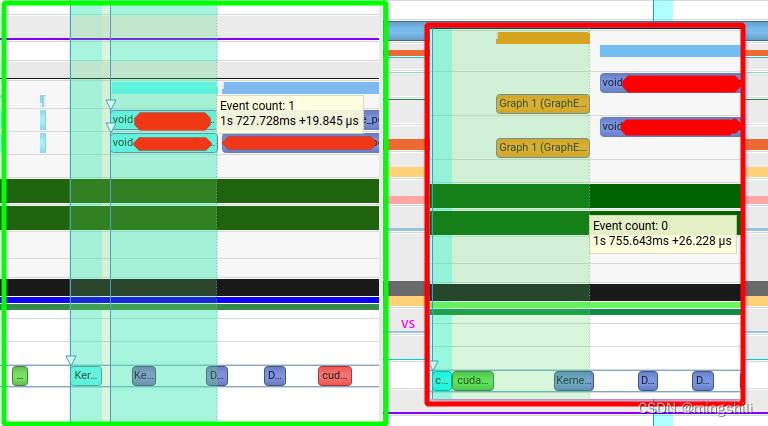
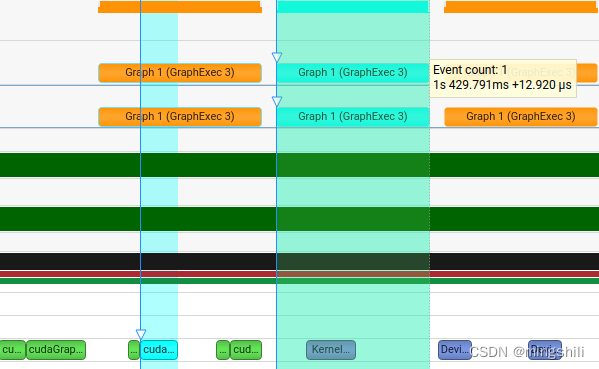
- 当连续执行graph多次,且存在kernel 参数更新的话,可以看到下一个graph启动与上一个graph执行存在并行,从而实现了graph的启动隐藏,并且graph执行要比kernel执行更加快,因此对于某个kernel重复执行多次且更改不大的情况下或者多流处理时,可以考虑用graph.
- 比如一些固定输入的kernel 需要多次执行,且可以用stream并行,那么可以考虑用graph来高效执行。
3. 不同版本的api
#if CUDA_VERSION < 12000
cudaGraphExecUpdateResult update_result{};
cudaGraphNode_t error_node = nullptr;
OF_CUDA_CHECK(cudaGraphExecUpdate(graph_exec_, graph, &error_node, &update_result));
if (update_result == cudaGraphExecUpdateSuccess) { return; }
#else
cudaGraphExecUpdateResultInfo update_result{}; // 新版本使用这个结构体接受
OF_CUDA_CHECK(cudaGraphExecUpdate(graph_exec_, graph, &update_result));
if (update_result.result == cudaGraphExecUpdateSuccess) { return; }
#endif // CUDA_VERSION < 12000
4. 官方文档cuda graph对engine的操作
- nvidia-doc: https://docs.nvidia.com/deeplearning/tensorrt/developer-guide/index.html#command-line-programs
// Call enqueueV3() once after an input shape change to update internal state.
context->enqueueV3(stream);
// Capture a CUDA graph instance
cudaGraph_t graph;
cudaGraphExec_t instance;
cudaStreamBeginCapture(stream, cudaStreamCaptureModeGlobal);
context->enqueueV3(stream);
cudaStreamEndCapture(stream, &graph);
cudaGraphInstantiate(&instance, graph, 0);
欢迎来到FlagOS开发社区,这里是一个汇聚了AI开发者、数据科学家、机器学习爱好者以及业界专家的活力平台。我们致力于成为业内领先的Triton技术交流与应用分享的殿堂,为推动人工智能技术的普及与深化应用贡献力量。
更多推荐



 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)