triton学习笔记6: Fused Attention
本文分享了Flash Attention v2的学习笔记,主要内容包括: Flash Attention v2的主要优化点:减少非matmul计算、优化seqlen维度并行、改进Warp分区策略 对比v1和v2的计算逻辑差异,包括IO交换次数减少和循环顺序调整 提供官方Triton实现的代码片段,展示了注意力机制的核心计算过程 介绍了在不同硬件平台上的配置选项 文章是系列笔记的一部分,涉及Flas
这是之前的学习笔记
- triton puzzles part1
- triton puzzles part2
- triton puzzles part3
- triton tutorials part1
- triton tutorials: part2
Fused Attention主要描述的是Flash Attention系列,v1在triton学习笔记2: 循环优化术 中已经提过,本篇顺着官网的实现学习v2和v3, flash decoding/flash decoding++相关的知识
Flash Attention v2
Flash Attention v1和Flash Attention v2的计算逻辑
flash attention v1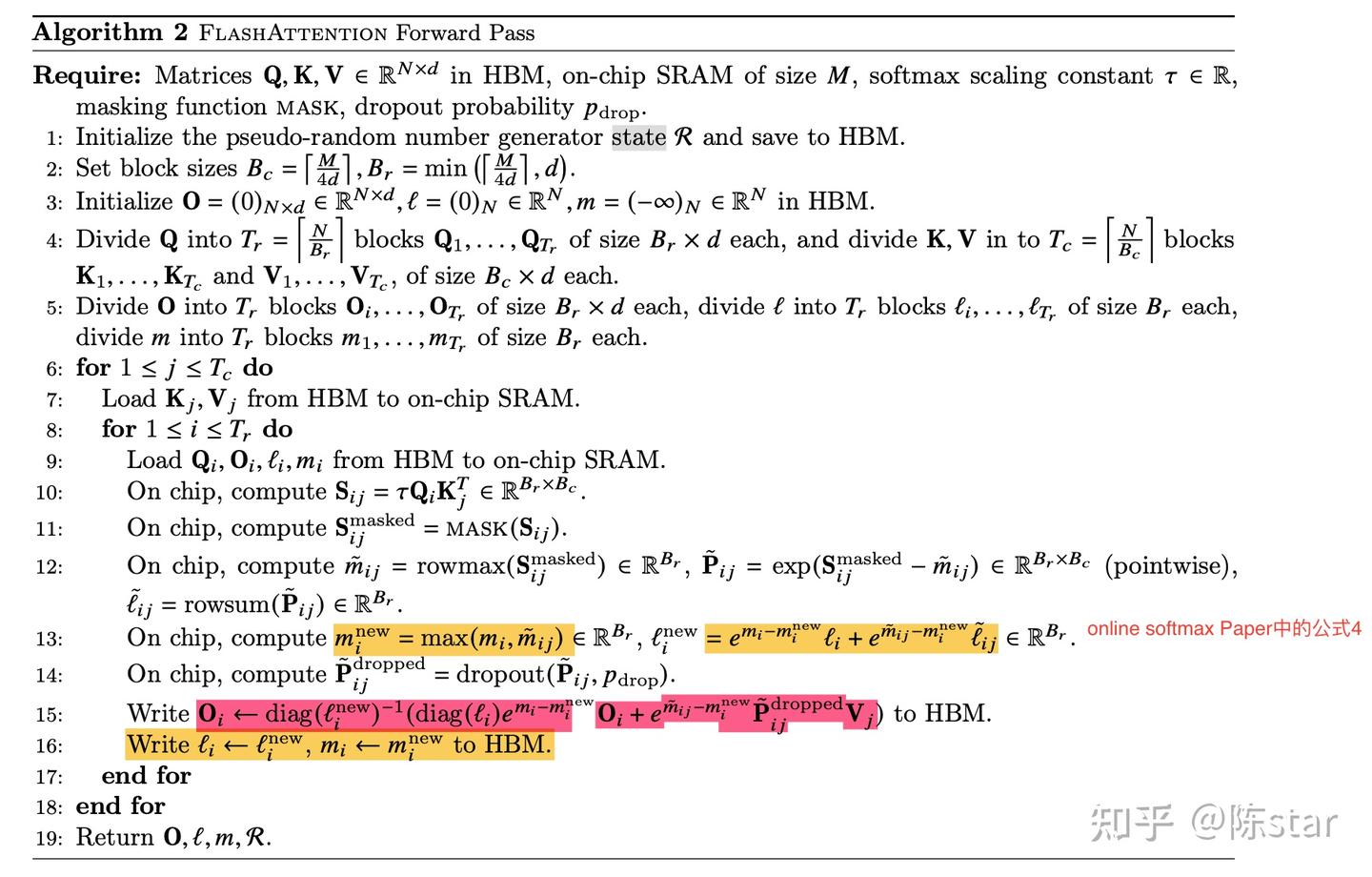
flash attention v2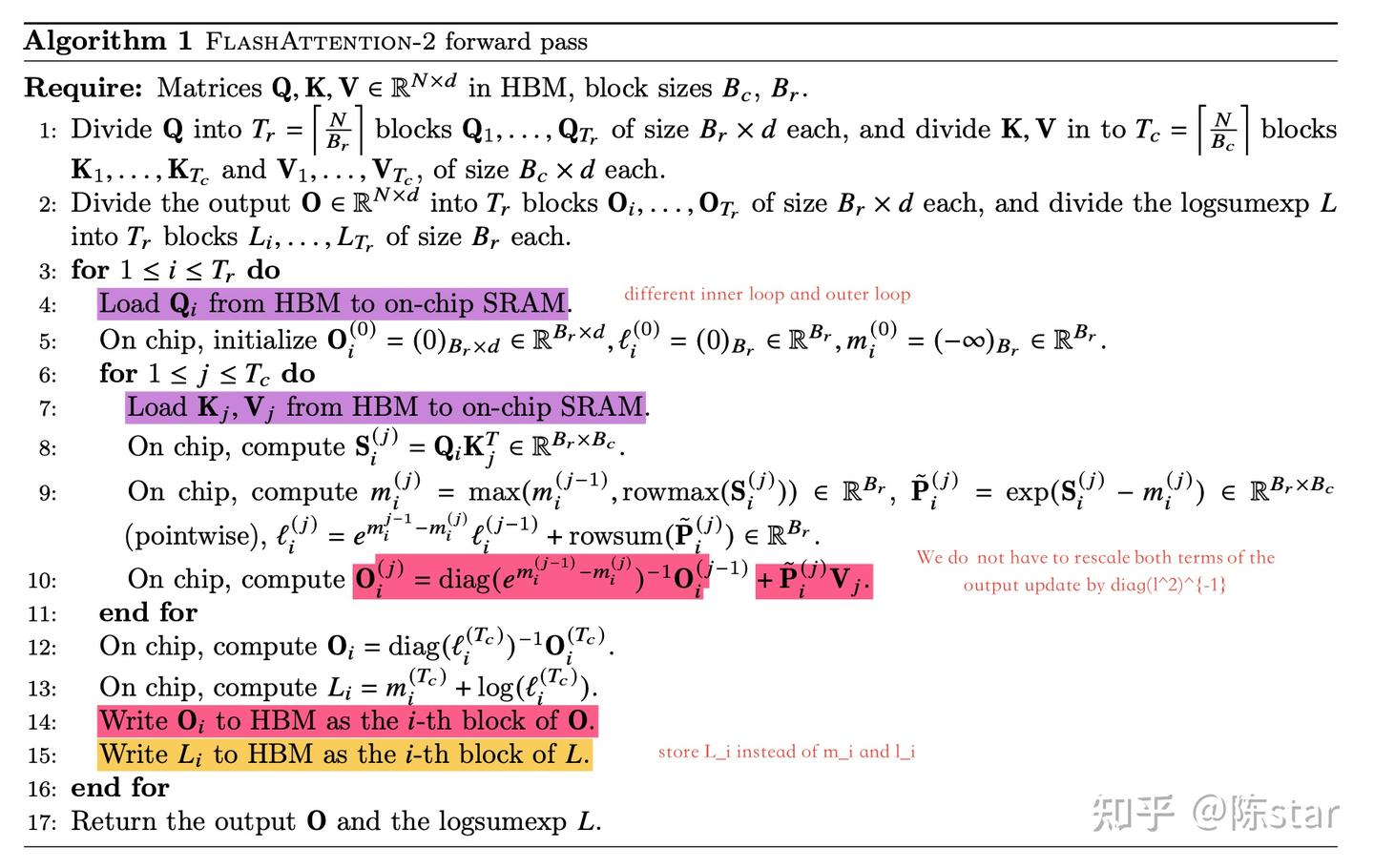
Flash attention v2相比flash attention,主要优化的地方在于:
- 减少大量非matmul的冗余计算,增加Tensor Cores运算比例
- diag的rescale次数要比flash attention v1少,不用每次都写HBM了
- seqlen维度并行优化
-
从图中可以看出flash attention v2和HBM交换IO的次数要少于flash attention v1
-
外部循环是先load Q,那么就可以把不同的query块的Attention分配不同thread block进行计算,这些thread block之间是不需要通信的。
-
backward pass不改变循环顺序的原因:调换循环顺序后,会导致需要通信的操作增加:1 -> 2。原先只有dQi需要通信,如果调换循环顺序,会导致dV,dK需要通信。因此,采用先K,V再Q的顺序,会稍微更快一些。
- 更好的Warp Partitioning策略,避免Split-K
官网代码
"""
Fused Attention
===============
This is a Triton implementation of the Flash Attention v2 algorithm from Tri Dao (https://tridao.me/publications/flash2/flash2.pdf)
Credits: OpenAI kernel team
Extra Credits:
* Original flash attention paper (https://arxiv.org/abs/2205.14135)
* Rabe and Staats (https://arxiv.org/pdf/2112.05682v2.pdf)
"""
import pytest
import torch
import os
import triton
import triton.language as tl
from triton.tools.tensor_descriptor import TensorDescriptor
DEVICE = triton.runtime.driver.active.get_active_torch_device()
def is_hip():
return triton.runtime.driver.active.get_current_target().backend == "hip"
def is_cuda():
return triton.runtime.driver.active.get_current_target().backend == "cuda"
def supports_host_descriptor():
return is_cuda() and torch.cuda.get_device_capability()[0] >= 9
def is_blackwell():
return is_cuda() and torch.cuda.get_device_capability()[0] == 10
@triton.jit
def _attn_fwd_inner(acc, l_i, m_i, q, #
desc_k, desc_v, #
offset_y, dtype: tl.constexpr, start_m, qk_scale, #
BLOCK_M: tl.constexpr, HEAD_DIM: tl.constexpr, BLOCK_N: tl.constexpr, #
STAGE: tl.constexpr, offs_m: tl.constexpr, offs_n: tl.constexpr, #
N_CTX: tl.constexpr, warp_specialize: tl.constexpr):
# range of values handled by this stage
if STAGE == 1:
lo, hi = 0, start_m * BLOCK_M
elif STAGE == 2:
lo, hi = start_m * BLOCK_M, (start_m + 1) * BLOCK_M
lo = tl.multiple_of(lo, BLOCK_M)
# causal = False
else:
lo, hi = 0, N_CTX
offsetkv_y = offset_y + lo
# loop over k, v and update accumulator
for start_n in tl.range(lo, hi, BLOCK_N, warp_specialize=warp_specialize):
start_n = tl.multiple_of(start_n, BLOCK_N)
# -- compute qk ----
k = desc_k.load([offsetkv_y, 0]).T
qk = tl.dot(q, k)
if STAGE == 2:
mask = offs_m[:, None] >= (start_n + offs_n[None, :])
qk = qk * qk_scale + tl.where(mask, 0, -1.0e6)
m_ij = tl.maximum(m_i, tl.max(qk, 1))
qk -= m_ij[:, None]
else:
m_ij = tl.maximum(m_i, tl.max(qk, 1) * qk_scale)
qk = qk * qk_scale - m_ij[:, None]
p = tl.math.exp2(qk)
# -- compute correction factor
alpha = tl.math.exp2(m_i - m_ij)
l_ij = tl.sum(p, 1)
# -- update output accumulator --
acc = acc * alpha[:, None]
# prepare p and v for the dot
v = desc_v.load([offsetkv_y, 0])
p = p.to(dtype)
# note that this non transposed v for FP8 is only supported on Blackwell
acc = tl.dot(p, v, acc)
# update m_i and l_i
# place this at the end of the loop to reduce register pressure
l_i = l_i * alpha + l_ij
m_i = m_ij
offsetkv_y += BLOCK_N
return acc, l_i, m_i
def _host_descriptor_pre_hook(nargs):
BLOCK_M = nargs["BLOCK_M"]
BLOCK_N = nargs["BLOCK_N"]
HEAD_DIM = nargs["HEAD_DIM"]
if not isinstance(nargs["desc_q"], TensorDescriptor):
return
nargs["desc_q"].block_shape = [BLOCK_M, HEAD_DIM]
nargs["desc_v"].block_shape = [BLOCK_N, HEAD_DIM]
nargs["desc_k"].block_shape = [BLOCK_N, HEAD_DIM]
nargs["desc_o"].block_shape = [BLOCK_M, HEAD_DIM]
if is_hip():
NUM_STAGES_OPTIONS = [1]
elif supports_host_descriptor():
NUM_STAGES_OPTIONS = [2, 3, 4]
else:
NUM_STAGES_OPTIONS = [2, 3, 4]
configs = [
triton.Config({'BLOCK_M': BM, 'BLOCK_N': BN}, num_stages=s, num_warps=w, pre_hook=_host_descriptor_pre_hook) \
for BM in [64, 128]\
for BN in [64, 128]\
for s in NUM_STAGES_OPTIONS \
for w in [4, 8]\
]
if "PYTEST_VERSION" in os.environ:
# Use a single config in testing for reproducibility
configs = [
triton.Config(dict(BLOCK_M=64, BLOCK_N=64), num_stages=2, num_warps=4, pre_hook=_host_descriptor_pre_hook),
]
def keep(conf):
BLOCK_M = conf.kwargs["BLOCK_M"]
BLOCK_N = conf.kwargs["BLOCK_N"]
return not (torch.cuda.get_device_capability()[0] == 9 and BLOCK_M * BLOCK_N < 128 * 128 and conf.num_warps == 8)
def prune_invalid_configs(configs, named_args, **kwargs):
N_CTX = kwargs["N_CTX"]
# Filter out configs where BLOCK_M > N_CTX
return [conf for conf in configs if conf.kwargs.get("BLOCK_M", 0) <= N_CTX]
@triton.jit
def _maybe_make_tensor_desc(desc_or_ptr, shape, strides, block_shape):
if isinstance(desc_or_ptr, tl.tensor_descriptor):
return desc_or_ptr
else:
return tl.make_tensor_descriptor(desc_or_ptr, shape, strides, block_shape)
@triton.autotune(configs=list(filter(keep, configs)), key=["N_CTX", "HEAD_DIM", "FP8_OUTPUT", "warp_specialize"],
prune_configs_by={'early_config_prune': prune_invalid_configs})
@triton.jit
def _attn_fwd(sm_scale, M, #
Z, H, desc_q, desc_k, desc_v, desc_o, N_CTX, #
HEAD_DIM: tl.constexpr, #
BLOCK_M: tl.constexpr, #
BLOCK_N: tl.constexpr, #
FP8_OUTPUT: tl.constexpr, #
STAGE: tl.constexpr, #
warp_specialize: tl.constexpr, #
):
dtype = tl.float8e5 if FP8_OUTPUT else tl.float16
tl.static_assert(BLOCK_N <= HEAD_DIM)
start_m = tl.program_id(0)
off_hz = tl.program_id(1)
off_z = off_hz // H
off_h = off_hz % H
y_dim = Z * H * N_CTX
desc_q = _maybe_make_tensor_desc(desc_q, shape=[y_dim, HEAD_DIM], strides=[HEAD_DIM, 1],
block_shape=[BLOCK_M, HEAD_DIM])
desc_v = _maybe_make_tensor_desc(desc_v, shape=[y_dim, HEAD_DIM], strides=[HEAD_DIM, 1],
block_shape=[BLOCK_N, HEAD_DIM])
desc_k = _maybe_make_tensor_desc(desc_k, shape=[y_dim, HEAD_DIM], strides=[HEAD_DIM, 1],
block_shape=[BLOCK_N, HEAD_DIM])
desc_o = _maybe_make_tensor_desc(desc_o, shape=[y_dim, HEAD_DIM], strides=[HEAD_DIM, 1],
block_shape=[BLOCK_M, HEAD_DIM])
offset_y = off_z * (N_CTX * H) + off_h * N_CTX
qo_offset_y = offset_y + start_m * BLOCK_M
# initialize offsets
offs_m = start_m * BLOCK_M + tl.arange(0, BLOCK_M)
offs_n = tl.arange(0, BLOCK_N)
# initialize pointer to m and l
m_i = tl.zeros([BLOCK_M], dtype=tl.float32) - float("inf")
l_i = tl.zeros([BLOCK_M], dtype=tl.float32) + 1.0
acc = tl.zeros([BLOCK_M, HEAD_DIM], dtype=tl.float32)
# load scales
qk_scale = sm_scale
qk_scale *= 1.44269504 # 1/log(2)
# load q: it will stay in SRAM throughout
q = desc_q.load([qo_offset_y, 0])
# stage 1: off-band
# For causal = True, STAGE = 3 and _attn_fwd_inner gets 1 as its STAGE
# For causal = False, STAGE = 1, and _attn_fwd_inner gets 3 as its STAGE
if STAGE & 1:
acc, l_i, m_i = _attn_fwd_inner(acc, l_i, m_i, q, #
desc_k, desc_v, #
offset_y, dtype, start_m, qk_scale, #
BLOCK_M, HEAD_DIM, BLOCK_N, #
4 - STAGE, offs_m, offs_n, N_CTX, #
warp_specialize)
# stage 2: on-band
if STAGE & 2:
# barrier makes it easier for compielr to schedule the
# two loops independently
acc, l_i, m_i = _attn_fwd_inner(acc, l_i, m_i, q, #
desc_k, desc_v, #
offset_y, dtype, start_m, qk_scale, #
BLOCK_M, HEAD_DIM, BLOCK_N, #
2, offs_m, offs_n, N_CTX, #
warp_specialize)
# epilogue
m_i += tl.math.log2(l_i)
acc = acc / l_i[:, None]
m_ptrs = M + off_hz * N_CTX + offs_m
tl.store(m_ptrs, m_i)
desc_o.store([qo_offset_y, 0], acc.to(dtype))
@triton.jit
def _attn_bwd_preprocess(O, DO, #
Delta, #
Z, H, N_CTX, #
BLOCK_M: tl.constexpr, HEAD_DIM: tl.constexpr #
):
off_m = tl.program_id(0) * BLOCK_M + tl.arange(0, BLOCK_M)
off_hz = tl.program_id(1)
off_n = tl.arange(0, HEAD_DIM)
# load
o = tl.load(O + off_hz * HEAD_DIM * N_CTX + off_m[:, None] * HEAD_DIM + off_n[None, :])
do = tl.load(DO + off_hz * HEAD_DIM * N_CTX + off_m[:, None] * HEAD_DIM + off_n[None, :]).to(tl.float32)
delta = tl.sum(o * do, axis=1)
# write-back
tl.store(Delta + off_hz * N_CTX + off_m, delta)
# The main inner-loop logic for computing dK and dV.
@triton.jit
def _attn_bwd_dkdv(dk, dv, #
Q, k, v, sm_scale, #
DO, #
M, D, #
# shared by Q/K/V/DO.
stride_tok, stride_d, #
H, N_CTX, BLOCK_M1: tl.constexpr, #
BLOCK_N1: tl.constexpr, #
HEAD_DIM: tl.constexpr, #
# Filled in by the wrapper.
start_n, start_m, num_steps, #
MASK: tl.constexpr):
offs_m = start_m + tl.arange(0, BLOCK_M1)
offs_n = start_n + tl.arange(0, BLOCK_N1)
offs_k = tl.arange(0, HEAD_DIM)
qT_ptrs = Q + offs_m[None, :] * stride_tok + offs_k[:, None] * stride_d
do_ptrs = DO + offs_m[:, None] * stride_tok + offs_k[None, :] * stride_d
# BLOCK_N1 must be a multiple of BLOCK_M1, otherwise the code wouldn't work.
tl.static_assert(BLOCK_N1 % BLOCK_M1 == 0)
curr_m = start_m
step_m = BLOCK_M1
for blk_idx in range(num_steps):
qT = tl.load(qT_ptrs)
# Load m before computing qk to reduce pipeline stall.
offs_m = curr_m + tl.arange(0, BLOCK_M1)
m = tl.load(M + offs_m)
qkT = tl.dot(k, qT)
pT = tl.math.exp2(qkT - m[None, :])
# Autoregressive masking.
if MASK:
mask = (offs_m[None, :] >= offs_n[:, None])
pT = tl.where(mask, pT, 0.0)
do = tl.load(do_ptrs)
# Compute dV.
ppT = pT
ppT = ppT.to(tl.float16)
dv += tl.dot(ppT, do)
# D (= delta) is pre-divided by ds_scale.
Di = tl.load(D + offs_m)
# Compute dP and dS.
dpT = tl.dot(v, tl.trans(do)).to(tl.float32)
dsT = pT * (dpT - Di[None, :])
dsT = dsT.to(tl.float16)
dk += tl.dot(dsT, tl.trans(qT))
# Increment pointers.
curr_m += step_m
qT_ptrs += step_m * stride_tok
do_ptrs += step_m * stride_tok
return dk, dv
# the main inner-loop logic for computing dQ
@triton.jit
def _attn_bwd_dq(dq, q, K, V, #
do, m, D,
# shared by Q/K/V/DO.
stride_tok, stride_d, #
H, N_CTX, #
BLOCK_M2: tl.constexpr, #
BLOCK_N2: tl.constexpr, #
HEAD_DIM: tl.constexpr,
# Filled in by the wrapper.
start_m, start_n, num_steps, #
MASK: tl.constexpr):
offs_m = start_m + tl.arange(0, BLOCK_M2)
offs_n = start_n + tl.arange(0, BLOCK_N2)
offs_k = tl.arange(0, HEAD_DIM)
kT_ptrs = K + offs_n[None, :] * stride_tok + offs_k[:, None] * stride_d
vT_ptrs = V + offs_n[None, :] * stride_tok + offs_k[:, None] * stride_d
# D (= delta) is pre-divided by ds_scale.
Di = tl.load(D + offs_m)
# BLOCK_M2 must be a multiple of BLOCK_N2, otherwise the code wouldn't work.
tl.static_assert(BLOCK_M2 % BLOCK_N2 == 0)
curr_n = start_n
step_n = BLOCK_N2
for blk_idx in range(num_steps):
kT = tl.load(kT_ptrs)
vT = tl.load(vT_ptrs)
qk = tl.dot(q, kT)
p = tl.math.exp2(qk - m)
# Autoregressive masking.
if MASK:
offs_n = curr_n + tl.arange(0, BLOCK_N2)
mask = (offs_m[:, None] >= offs_n[None, :])
p = tl.where(mask, p, 0.0)
# Compute dP and dS.
dp = tl.dot(do, vT).to(tl.float32)
ds = p * (dp - Di[:, None])
ds = ds.to(tl.float16)
# Compute dQ.
# NOTE: We need to de-scale dq in the end, because kT was pre-scaled.
dq += tl.dot(ds, tl.trans(kT))
# Increment pointers.
curr_n += step_n
kT_ptrs += step_n * stride_tok
vT_ptrs += step_n * stride_tok
return dq
@triton.jit
def _attn_bwd(Q, K, V, sm_scale, #
DO, #
DQ, DK, DV, #
M, D,
# shared by Q/K/V/DO.
stride_z, stride_h, stride_tok, stride_d, #
H, N_CTX, #
BLOCK_M1: tl.constexpr, #
BLOCK_N1: tl.constexpr, #
BLOCK_M2: tl.constexpr, #
BLOCK_N2: tl.constexpr, #
BLK_SLICE_FACTOR: tl.constexpr, #
HEAD_DIM: tl.constexpr):
LN2: tl.constexpr = 0.6931471824645996 # = ln(2)
bhid = tl.program_id(2)
off_chz = (bhid * N_CTX).to(tl.int64)
adj = (stride_h * (bhid % H) + stride_z * (bhid // H)).to(tl.int64)
pid = tl.program_id(0)
# offset pointers for batch/head
Q += adj
K += adj
V += adj
DO += adj
DQ += adj
DK += adj
DV += adj
M += off_chz
D += off_chz
# load scales
offs_k = tl.arange(0, HEAD_DIM)
start_n = pid * BLOCK_N1
start_m = start_n
MASK_BLOCK_M1: tl.constexpr = BLOCK_M1 // BLK_SLICE_FACTOR
offs_n = start_n + tl.arange(0, BLOCK_N1)
dv = tl.zeros([BLOCK_N1, HEAD_DIM], dtype=tl.float32)
dk = tl.zeros([BLOCK_N1, HEAD_DIM], dtype=tl.float32)
# load K and V: they stay in SRAM throughout the inner loop.
k = tl.load(K + offs_n[:, None] * stride_tok + offs_k[None, :] * stride_d)
v = tl.load(V + offs_n[:, None] * stride_tok + offs_k[None, :] * stride_d)
num_steps = BLOCK_N1 // MASK_BLOCK_M1
dk, dv = _attn_bwd_dkdv(dk, dv, #
Q, k, v, sm_scale, #
DO, #
M, D, #
stride_tok, stride_d, #
H, N_CTX, #
MASK_BLOCK_M1, BLOCK_N1, HEAD_DIM, #
start_n, start_m, num_steps, #
MASK=True #
)
start_m += num_steps * MASK_BLOCK_M1
num_steps = (N_CTX - start_m) // BLOCK_M1
# Compute dK and dV for non-masked blocks.
dk, dv = _attn_bwd_dkdv( #
dk, dv, #
Q, k, v, sm_scale, #
DO, #
M, D, #
stride_tok, stride_d, #
H, N_CTX, #
BLOCK_M1, BLOCK_N1, HEAD_DIM, #
start_n, start_m, num_steps, #
MASK=False #
)
dv_ptrs = DV + offs_n[:, None] * stride_tok + offs_k[None, :] * stride_d
tl.store(dv_ptrs, dv)
# Write back dK.
dk *= sm_scale
dk_ptrs = DK + offs_n[:, None] * stride_tok + offs_k[None, :] * stride_d
tl.store(dk_ptrs, dk)
# THIS BLOCK DOES DQ:
start_m = pid * BLOCK_M2
end_n = start_m + BLOCK_M2
MASK_BLOCK_N2: tl.constexpr = BLOCK_N2 // BLK_SLICE_FACTOR
offs_m = start_m + tl.arange(0, BLOCK_M2)
q = tl.load(Q + offs_m[:, None] * stride_tok + offs_k[None, :] * stride_d)
dq = tl.zeros([BLOCK_M2, HEAD_DIM], dtype=tl.float32)
do = tl.load(DO + offs_m[:, None] * stride_tok + offs_k[None, :] * stride_d)
m = tl.load(M + offs_m)
m = m[:, None]
# Compute dQ for masked (diagonal) blocks.
# NOTE: This code scans each row of QK^T backward (from right to left,
# but inside each call to _attn_bwd_dq, from left to right), but that's
# not due to anything important. I just wanted to reuse the loop
# structure for dK & dV above as much as possible.
num_steps = BLOCK_M2 // MASK_BLOCK_N2
dq = _attn_bwd_dq(dq, q, K, V, #
do, m, D, #
stride_tok, stride_d, #
H, N_CTX, #
BLOCK_M2, MASK_BLOCK_N2, HEAD_DIM, #
start_m, end_n - num_steps * MASK_BLOCK_N2, num_steps, #
MASK=True #
)
end_n -= num_steps * MASK_BLOCK_N2
# stage 2
num_steps = end_n // BLOCK_N2
dq = _attn_bwd_dq(dq, q, K, V, #
do, m, D, #
stride_tok, stride_d, #
H, N_CTX, #
BLOCK_M2, BLOCK_N2, HEAD_DIM, #
start_m, end_n - num_steps * BLOCK_N2, num_steps, #
MASK=False #
)
# Write back dQ.
dq_ptrs = DQ + offs_m[:, None] * stride_tok + offs_k[None, :] * stride_d
dq *= LN2
tl.store(dq_ptrs, dq)
class _attention(torch.autograd.Function):
@staticmethod
def forward(ctx, q, k, v, causal, sm_scale, warp_specialize=True):
# shape constraints
HEAD_DIM_Q, HEAD_DIM_K = q.shape[-1], k.shape[-1]
# when v is in float8_e5m2 it is transposed.
HEAD_DIM_V = v.shape[-1]
assert HEAD_DIM_Q == HEAD_DIM_K and HEAD_DIM_K == HEAD_DIM_V
assert HEAD_DIM_K in {16, 32, 64, 128, 256}
o = torch.empty_like(q)
stage = 3 if causal else 1
extra_kern_args = {}
# Tuning for AMD target
if is_hip():
waves_per_eu = 3 if HEAD_DIM_K <= 64 else 2
extra_kern_args = {"waves_per_eu": waves_per_eu, "allow_flush_denorm": True}
M = torch.empty((q.shape[0], q.shape[1], q.shape[2]), device=q.device, dtype=torch.float32)
if supports_host_descriptor():
# Note that on Hopper we cannot perform a FP8 dot with a non-transposed second tensor
y_dim = q.shape[0] * q.shape[1] * q.shape[2]
dummy_block = [1, 1]
desc_q = TensorDescriptor(q, shape=[y_dim, HEAD_DIM_K], strides=[HEAD_DIM_K, 1], block_shape=dummy_block)
desc_v = TensorDescriptor(v, shape=[y_dim, HEAD_DIM_K], strides=[HEAD_DIM_K, 1], block_shape=dummy_block)
desc_k = TensorDescriptor(k, shape=[y_dim, HEAD_DIM_K], strides=[HEAD_DIM_K, 1], block_shape=dummy_block)
desc_o = TensorDescriptor(o, shape=[y_dim, HEAD_DIM_K], strides=[HEAD_DIM_K, 1], block_shape=dummy_block)
else:
desc_q = q
desc_v = v
desc_k = k
desc_o = o
def alloc_fn(size: int, align: int, _):
return torch.empty(size, dtype=torch.int8, device="cuda")
triton.set_allocator(alloc_fn)
def grid(META):
return (triton.cdiv(q.shape[2], META["BLOCK_M"]), q.shape[0] * q.shape[1], 1)
ctx.grid = grid
if is_cuda() and warp_specialize:
extra_kern_args["maxnreg"] = 80
_attn_fwd[grid](
sm_scale, M, #
q.shape[0], q.shape[1], #
desc_q, desc_k, desc_v, desc_o, #
N_CTX=q.shape[2], #
HEAD_DIM=HEAD_DIM_K, #
FP8_OUTPUT=q.dtype == torch.float8_e5m2, #
STAGE=stage, #
warp_specialize=warp_specialize, #
**extra_kern_args)
ctx.save_for_backward(q, k, v, o, M)
ctx.sm_scale = sm_scale
ctx.HEAD_DIM = HEAD_DIM_K
ctx.causal = causal
return o
@staticmethod
def backward(ctx, do):
q, k, v, o, M = ctx.saved_tensors
assert do.is_contiguous()
assert q.stride() == k.stride() == v.stride() == o.stride() == do.stride()
dq = torch.empty_like(q)
dk = torch.empty_like(k)
dv = torch.empty_like(v)
BATCH, N_HEAD, N_CTX = q.shape[:3]
PRE_BLOCK = 128
NUM_WARPS, NUM_STAGES = 4, 5
BLOCK_M1, BLOCK_N1, BLOCK_M2, BLOCK_N2 = 32, 128, 128, 32
BLK_SLICE_FACTOR = 2
RCP_LN2 = 1.4426950408889634 # = 1.0 / ln(2)
arg_k = k
arg_k = arg_k * (ctx.sm_scale * RCP_LN2)
PRE_BLOCK = 128
assert N_CTX % PRE_BLOCK == 0
pre_grid = (N_CTX // PRE_BLOCK, BATCH * N_HEAD)
delta = torch.empty_like(M)
_attn_bwd_preprocess[pre_grid](
o, do, #
delta, #
BATCH, N_HEAD, N_CTX, #
BLOCK_M=PRE_BLOCK, HEAD_DIM=ctx.HEAD_DIM #
)
grid = (N_CTX // BLOCK_N1, 1, BATCH * N_HEAD)
_attn_bwd[grid](
q, arg_k, v, ctx.sm_scale, do, dq, dk, dv, #
M, delta, #
q.stride(0), q.stride(1), q.stride(2), q.stride(3), #
N_HEAD, N_CTX, #
BLOCK_M1=BLOCK_M1, BLOCK_N1=BLOCK_N1, #
BLOCK_M2=BLOCK_M2, BLOCK_N2=BLOCK_N2, #
BLK_SLICE_FACTOR=BLK_SLICE_FACTOR, #
HEAD_DIM=ctx.HEAD_DIM, #
num_warps=NUM_WARPS, #
num_stages=NUM_STAGES #
)
return dq, dk, dv, None, None, None, None
attention = _attention.apply
@pytest.mark.parametrize("Z", [1, 4])
@pytest.mark.parametrize("H", [2, 48])
@pytest.mark.parametrize("N_CTX", [128, 1024, (2 if is_hip() else 4) * 1024])
@pytest.mark.parametrize("HEAD_DIM", [64, 128])
@pytest.mark.parametrize("causal", [True]) # FIXME: Non-causal tests do not pass at the moment.
@pytest.mark.parametrize("warp_specialize", [False, True] if is_blackwell() else [False])
def test_op(Z, H, N_CTX, HEAD_DIM, causal, warp_specialize, dtype=torch.float16):
torch.manual_seed(20)
q = (torch.empty((Z, H, N_CTX, HEAD_DIM), dtype=dtype, device=DEVICE).normal_(mean=0.0, std=0.5).requires_grad_())
k = (torch.empty((Z, H, N_CTX, HEAD_DIM), dtype=dtype, device=DEVICE).normal_(mean=0.0, std=0.5).requires_grad_())
v = (torch.empty((Z, H, N_CTX, HEAD_DIM), dtype=dtype, device=DEVICE).normal_(mean=0.0, std=0.5).requires_grad_())
sm_scale = 0.5
dout = torch.randn_like(q)
# reference implementation
M = torch.tril(torch.ones((N_CTX, N_CTX), device=DEVICE))
p = torch.matmul(q, k.transpose(2, 3)) * sm_scale
if causal:
p[:, :, M == 0] = float("-inf")
p = torch.softmax(p.float(), dim=-1).half()
# p = torch.exp(p)
ref_out = torch.matmul(p, v)
ref_out.backward(dout)
ref_dv, v.grad = v.grad.clone(), None
ref_dk, k.grad = k.grad.clone(), None
ref_dq, q.grad = q.grad.clone(), None
# triton implementation
tri_out = attention(q, k, v, causal, sm_scale, warp_specialize).half()
tri_out.backward(dout)
tri_dv, v.grad = v.grad.clone(), None
tri_dk, k.grad = k.grad.clone(), None
tri_dq, q.grad = q.grad.clone(), None
# compare
torch.testing.assert_close(ref_out, tri_out, atol=1e-2, rtol=0)
rtol = 0.0
# Relative tolerance workaround for known hardware limitation of CDNA2 GPU.
# For details see https://pytorch.org/docs/stable/notes/numerical_accuracy.html#reduced-precision-fp16-and-bf16-gemms-and-convolutions-on-amd-instinct-mi200-devices
if torch.version.hip is not None and triton.runtime.driver.active.get_current_target().arch == "gfx90a":
rtol = 1e-2
torch.testing.assert_close(ref_dv, tri_dv, atol=1e-2, rtol=rtol)
torch.testing.assert_close(ref_dk, tri_dk, atol=1e-2, rtol=rtol)
torch.testing.assert_close(ref_dq, tri_dq, atol=1e-2, rtol=rtol)
try:
from flash_attn.flash_attn_interface import \
flash_attn_qkvpacked_func as flash_attn_func
HAS_FLASH = True
except BaseException:
HAS_FLASH = False
TORCH_HAS_FP8 = hasattr(torch, 'float8_e5m2')
BATCH, N_HEADS, HEAD_DIM = 4, 32, 64
# vary seq length for fixed head and batch=4
configs = []
for mode in ["fwd", "bwd"]:
for causal in [True, False]:
for warp_specialize in [True, False]:
if mode == "bwd" and not causal:
continue
configs.append(
triton.testing.Benchmark(
x_names=["N_CTX"],
x_vals=[2**i for i in range(10, 15)],
line_arg="provider",
line_vals=["triton-fp16"] + (["triton-fp8"] if TORCH_HAS_FP8 else []) +
(["flash"] if HAS_FLASH else []),
line_names=["Triton [FP16]"] + (["Triton [FP8]"] if TORCH_HAS_FP8 else []) +
(["Flash-2"] if HAS_FLASH else []),
styles=[("red", "-"), ("blue", "-"), ("green", "-")],
ylabel="TFLOPS",
plot_name=
f"fused-attention-batch{BATCH}-head{N_HEADS}-d{HEAD_DIM}-{mode}-causal={causal}-warp_specialize={warp_specialize}",
args={
"H": N_HEADS,
"BATCH": BATCH,
"HEAD_DIM": HEAD_DIM,
"mode": mode,
"causal": causal,
"warp_specialize": warp_specialize,
},
))
@triton.testing.perf_report(configs)
def bench_flash_attention(BATCH, H, N_CTX, HEAD_DIM, causal, warp_specialize, mode, provider, device=DEVICE):
assert mode in ["fwd", "bwd"]
dtype = torch.float16
if "triton" in provider:
q = torch.randn((BATCH, H, N_CTX, HEAD_DIM), dtype=dtype, device=device, requires_grad=True)
k = torch.randn((BATCH, H, N_CTX, HEAD_DIM), dtype=dtype, device=device, requires_grad=True)
v = torch.randn((BATCH, H, N_CTX, HEAD_DIM), dtype=dtype, device=device, requires_grad=True)
if mode == "fwd" and "fp8" in provider:
q = q.to(torch.float8_e5m2)
k = k.to(torch.float8_e5m2)
v = v.permute(0, 1, 3, 2).contiguous()
v = v.permute(0, 1, 3, 2)
v = v.to(torch.float8_e5m2)
sm_scale = 1.3
fn = lambda: attention(q, k, v, causal, sm_scale, warp_specialize)
if mode == "bwd":
o = fn()
do = torch.randn_like(o)
fn = lambda: o.backward(do, retain_graph=True)
ms = triton.testing.do_bench(fn)
if provider == "flash":
qkv = torch.randn((BATCH, N_CTX, 3, H, HEAD_DIM), dtype=dtype, device=device, requires_grad=True)
fn = lambda: flash_attn_func(qkv, causal=causal)
if mode == "bwd":
o = fn()
do = torch.randn_like(o)
fn = lambda: o.backward(do, retain_graph=True)
ms = triton.testing.do_bench(fn)
flops_per_matmul = 2.0 * BATCH * H * N_CTX * N_CTX * HEAD_DIM
total_flops = 2 * flops_per_matmul
if causal:
total_flops *= 0.5
if mode == "bwd":
total_flops *= 2.5 # 2.0(bwd) + 0.5(recompute)
return total_flops * 1e-12 / (ms * 1e-3)
if __name__ == "__main__":
# only works on post-Ampere GPUs right now
bench_flash_attention.run(save_path=".", print_data=True)义了 `_attn_fwd_inner` 函数,这是Fused Attention的核心逻辑,负责执行注意力计算的主要部分。它采用分阶段的方式处理数据,以优化内存访问和计算效率。
官网的代码定义了 _attn_fwd_inner 函数,这是Fused Attention的核心逻辑,负责执行注意力计算的主要部分。它采用分阶段的方式处理数据,以优化内存访问和计算效率。
使用 triton.jit 装饰器定义了 _attn_fwd 函数,这是前向传播的主要函数。它初始化了必要的变量,如累积器acc、中间变量l_i和m_i,并调用 _attn_fwd_inner 来执行核心计算。定义了 _attn_bwd_preprocess、_attn_bwd_dkdv 和 _attn_bwd_dq 函数,分别用于反向传播的预处理、计算dK和dV的梯度、以及计算dQ的梯度。
_attn_bwd 函数整合了反向传播的各个部分,负责整体的反向传播流程。
_attention 类继承自 torch.autograd.Function,它封装了前向和反向传播逻辑,使得这个Fused Attention操作可以无缝集成到PyTorch的自动求导系统中。
性能测试部分使用 pytest 参数化测试来验证Fused Attention的正确性,并与参考实现进行比较。同时,通过 triton.testing.perf_report 进行性能测试,比较Fused Attention与Flash Attention等其他实现的性能。
Flash Attention v3
背景知识
- 注意力机制瓶颈:Transformer 架构中的注意力机制由于其计算复杂度与序列长度呈二次关系,成为大型语言模型和长文本应用的瓶颈。
- FlashAttention 前作:之前的工作(如 FlashAttention 和 FlashAttention-2)通过减少内存读写和融合操作来加速注意力计算,但在新型 GPU(如 H100)上的利用率仍有提升空间。
FlashAttention-3 的优化技术
- 异步执行和 warp 专业化:利用 Tensor Cores 和 TMA 的异步特性,通过将数据生产和消费的 warp 分离,实现计算与数据传输的重叠。
- GEMM 和 softmax 指令重叠:在 softmax 计算的同时执行矩阵乘法(GEMM),通过重新设计算法以减少依赖关系,实现指令的并行执行。
- 低精度计算支持:利用 Hopper GPU 的 FP8 支持,通过块量化和不连贯处理技术,在保持准确性的同时提高计算效率。
研究方法
- 异步计算利用:通过 warp 专业化的软件流水线方案,将数据生产和消费的 warp 分离,以隐藏内存和指令发布延迟。
- 指令重叠:在算法中重叠 softmax 和 GEMM 指令,通过 pingpong 调度方式在不同 warp group 间交替执行 softmax 和 GEMM。
- 低精度优化:使用块量化和不连贯处理技术,通过在块级别进行量化和使用随机正交矩阵来减少量化误差。
实验和结果
- 性能提升:在 H100 GPU 上,FlashAttention-3 在 FP16 精度下实现了 1.5-2.0 倍于 FlashAttention-2 的速度提升,达到高达 740 TFLOPs/s(75% 的利用率)。在 FP8 精度下接近 1.2 PFLOPs/s。
- 准确性验证:FP8 的 FlashAttention-3 在数值误差上比基线 FP8 注意力低 2.6 倍。
- 与 cuDNN 的比较:在长序列情况下,FlashAttention-3 的 FP16 表现优于 NVIDIA cuDNN 库的实现。
关键结论
- FlashAttention-3 通过利用现代 GPU 的异步特性和低精度计算能力,显著提高了注意力机制的计算效率。
- 在 FP16 和 FP8 精度下均实现了显著的性能提升,同时保持或提高了计算准确性。
- 该方法在长序列长度下表现优异,能够处理大规模的 Transformer 模型。
方法细节和观点
- 异步和 warp 专业化:通过将线程分成生产者和消费者角色,生产者负责数据加载,消费者负责计算,从而实现数据传输和计算的并行。
- 指令重叠:在消费者 warpgroup 中,通过 pingpong 调度方式,使得一个 warpgroup 的 softmax 计算与另一个 warpgroup 的 GEMM 操作并行进行。
- 低精度计算:FP8 的使用需要特殊的布局转换和量化技术,以适应 Tensor Cores 的要求,并减少量化带来的误差。
现象
- 硬件特性利用:FlashAttention-3 深入利用了 Hopper GPU 的硬件特性,如 Tensor Cores 的异步执行和 TMA 的内存加载能力。
- 性能对比:与前代 FlashAttention 算法相比,FlashAttention-3 在不同序列长度和精度下均显示出显著的性能优势。
总结
- 创新点:FlashAttention-3 通过异步执行、指令重叠和低精度计算支持,在 GPU 上实现了更快且更准确的注意力计算。
- 意义:该方法对于长序列长度和大规模 Transformer 模型的训练和推理具有重要意义,能够提高处理效率并降低计算资源消耗。
- 未来工作:作者提到将优化 LLM 推理、集成持久内核设计到 FP8 内核中,并进一步研究低精度注意力在大规模训练中的影响。
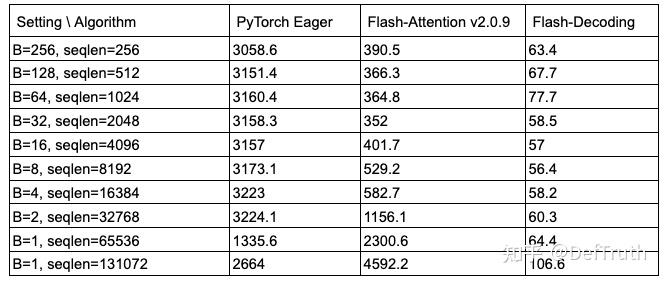
FlashDecoding
Flash decoding主要优化的地方是split-k/v:
- 首先,将K/V切分成更小的块,比如5块;
- 然后在这些K/V块上,使用标准FlashAttention进行计算,得到所有小块的局部结果
- 最后,使用一个额外的kernel做全局的reduce,得到正确输出
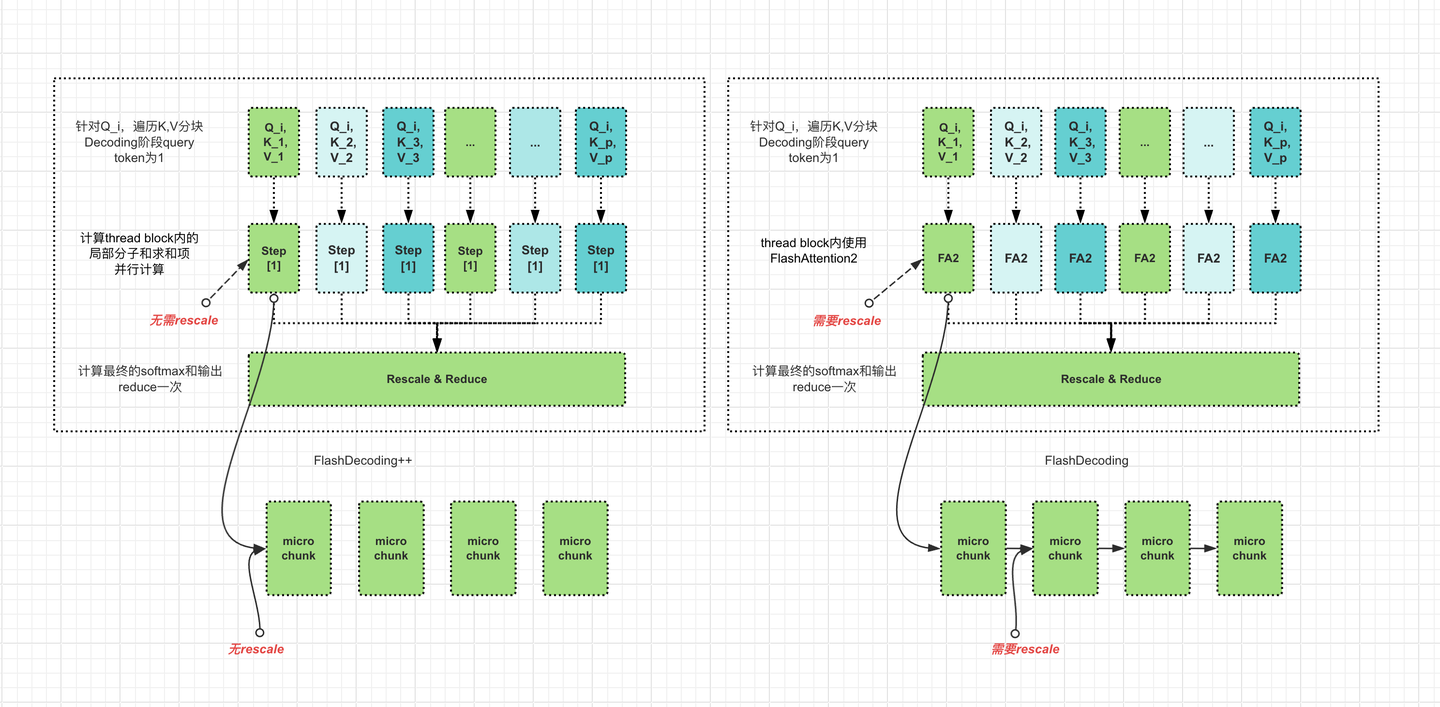
FlashDecoding++
- 在FlashDecoding的基础上预估一个合理的数代替每行的最大值防止溢出,如果溢出则Fallback到FlashDecoding的计算,这样就没有顺序依赖了,并且无需额外的rescale,且可以进行并行计算。
Reference
-
Flash decoding/Flash decoding++: https://zhuanlan.zhihu.com/p/696075602
-
Flash Attention v1/v2/v3: https://zhuanlan.zhihu.com/p/668888063
-
Flash Attention: https://arxiv.org/pdf/2205.14135
欢迎来到FlagOS开发社区,这里是一个汇聚了AI开发者、数据科学家、机器学习爱好者以及业界专家的活力平台。我们致力于成为业内领先的Triton技术交流与应用分享的殿堂,为推动人工智能技术的普及与深化应用贡献力量。
更多推荐
 34
34 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)